 >
>
Concept Graph & Resume using Claude 3 Opus | Chat GPT4o | Llama 3:
Resume:
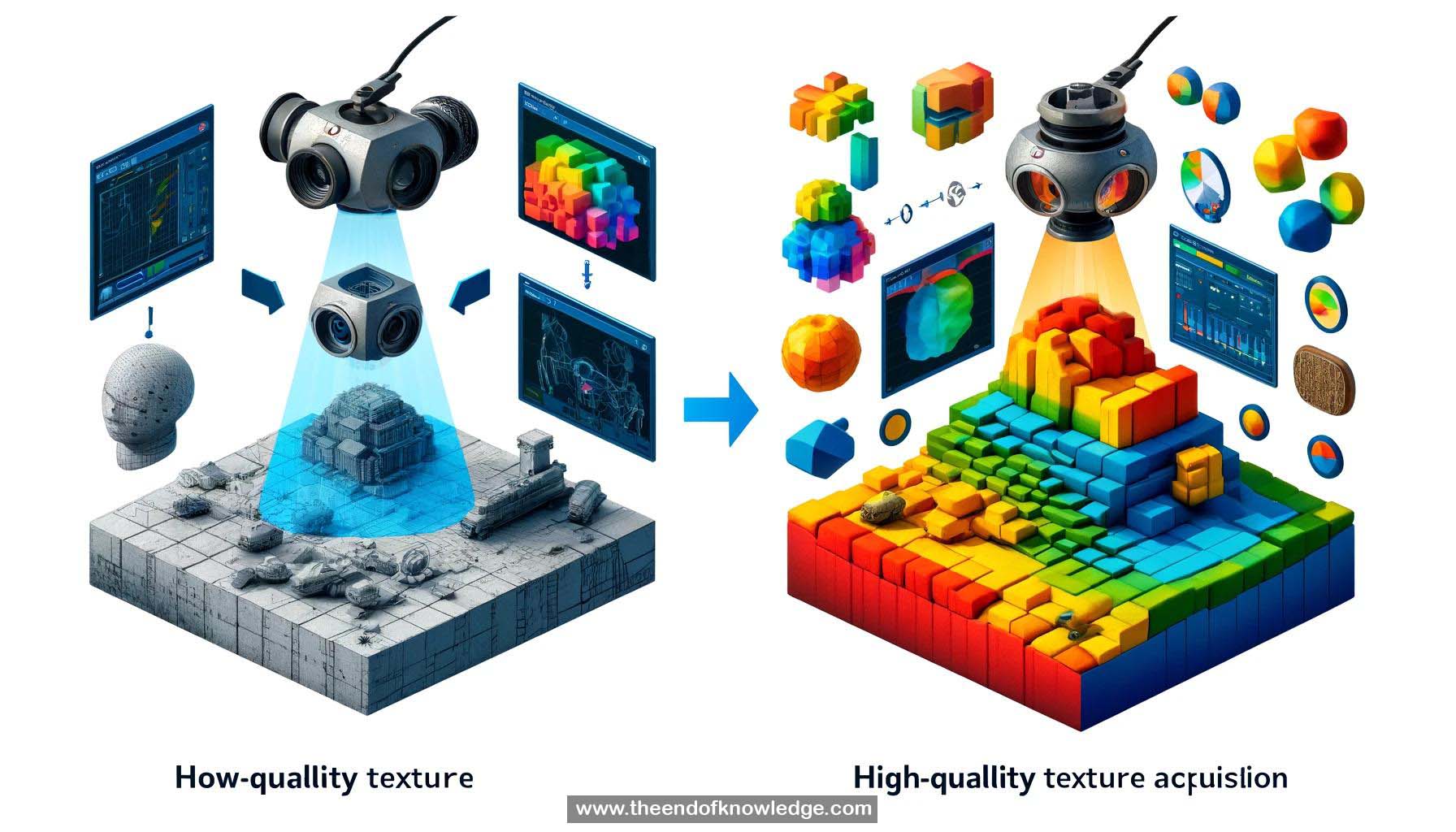
1.- Texture Fusion: High-quality texture acquisition for real-time RGB-D scanning.
2.- Existing real-time texture representation restores per-voxel color, resulting in low-quality texture.
3.- Texture Fusion enables real-time 3D scanning with aligned, high-quality texture.
4.- Traditional online scanning methods use per-voxel color representation, limiting texture quality and causing blurriness.
5.- Traditional texture mapping requires separate geometry and texture reconstruction, taking several minutes, unsuitable for real-time.
6.- Key insight: maintain 2D texture topology by avoiding explicit meshing.
7.- Tile-based texture data structure proposed for real-time 3D scanning.
8.- Tile tree-inspired structure maps texture to geometry by projecting implicit surface to assigned texture tile.
9.- Texture framework achieves high resolution even with low voxel resolution.
10.- Novel texture reconstruction framework simultaneously updates geometry and texture.
11.- Depth integrated into previous geometry, yielding current geometry; previous texture transferred to current geometry.
12.- Camera pose estimated using current depth map's geometric information due to asynchronous color/depth capture.
13.- Spatially varying camera motion field estimated to mitigate mismatch between current color image and texture map.
14.- Camera motion grid optimized by maximizing photometric consistency of local 3D texture patch with respect to image.
15.- Multi-level optimization of camera motion grid, from coarse to fine.
16.- Current image warped to align with previous texture map, then blended to update current texture map.
17.- Demonstrated application using conventional RGB-D camera, capturing 3D scenes with high-quality texture in real-time.
18.- Demo reconstructs geometry and texture simultaneously at 35 frames per second.
19.- Voxel representation has low-resolution texture limited by voxel resolution.
20.- Texture mapping without warping improves quality but still blurred.
21.- Spatially varying warp field integrates texture information with high quality.
22.- Real-time texture reconstruction framework presented for online RGB-D scanning.
23.- Tile-based texture data structure proposed for real-time texture acquisition.
24.- Spatially varying perspective warp introduced for real-time texture alignment.
25.- Code and paper available online.
Knowledge Vault built byDavid Vivancos 2024